Revolutionizing Prosthetics
Overview
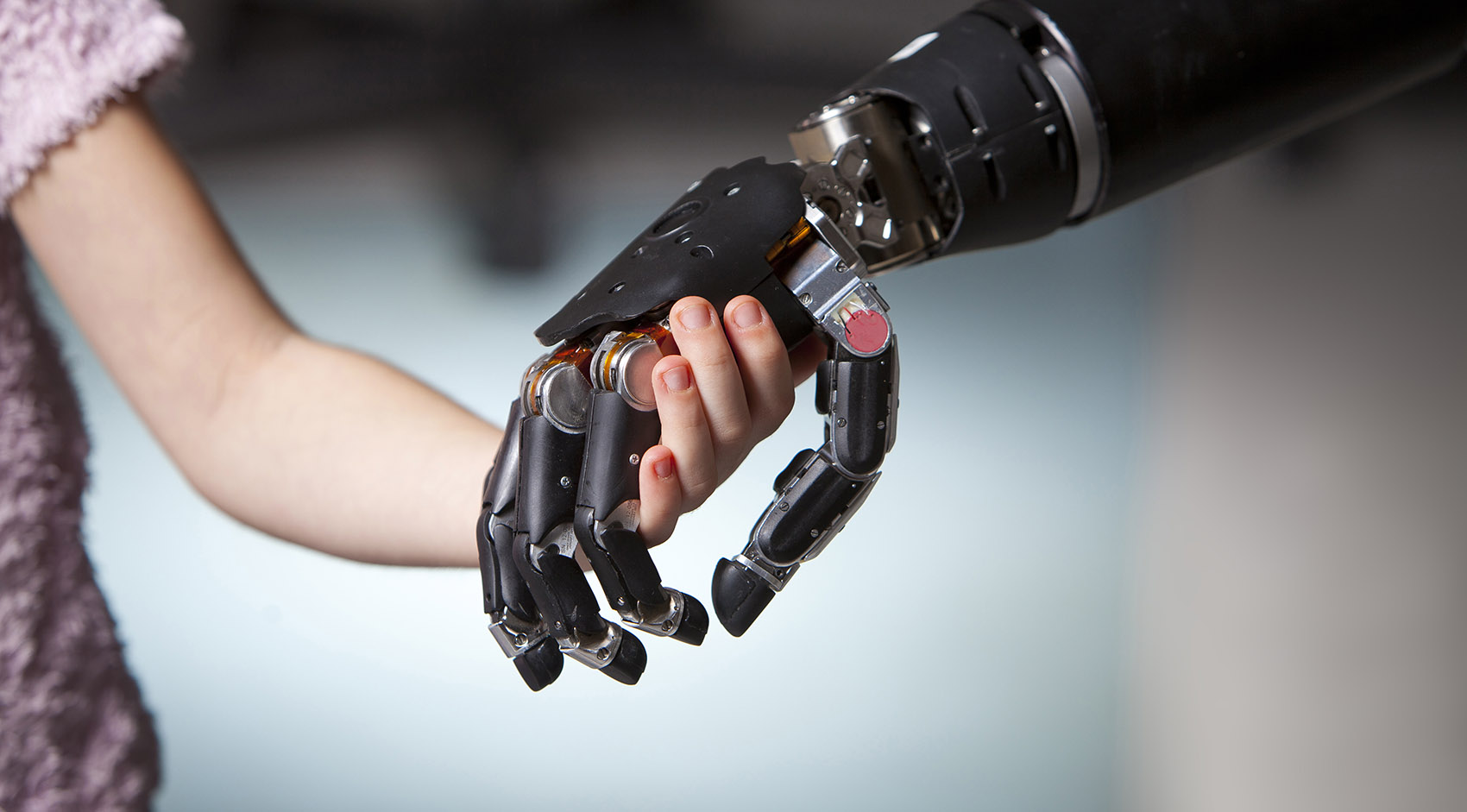
Begun in 2006, the Defense Advanced Research Project Agency’s (DARPA) Revolutionizing Prosthetics program set out to expand prosthetic arm options for wounded warriors. The program provided funding to APL to produce a fully neurally integrated upper-extremity prosthesis to support clinical trials and manufacturing transition. This led to the development of our Modular Prosthetic Limb (MPL).
Our requirements for the MPL were aimed at reflecting the capabilities of a human upper limb, including:
- mechanical components that would provide equivalent degrees of freedom, strength, and environmental tolerance (to heat, cold water, humidity, dust, etc.)
- materials that would enable the limb to weight approximately as much as the upper limb of an average human
- sensors for touch, temperature, vibration, and proprioception (the ability to sense the position of the arm and hand relative to other parts of the body)
- power that would allow extended continuous use
With this new prosthesis, an individual who has lost their upper limb would be able to manipulate and feel objects as if with a biological hand.
Virtual Integration Environment
The MPL was initially developed as a research platform. Because only a limited number of them could be made, APL developed the Virtual Integration Environment (VIE), a modular and configurable system to support various limb models (including the MPL) and algorithms in order to facilitate virtual demonstrations of highly dexterous control of an upper-limb prosthesis. It serves as a complete limb system simulation environment to support neural integration. The VIE is used to visualize and monitor performance of various design approaches, pilot neural signal analysis algorithms, and simulate emerging mechatronic elements. It provides a framework for synchronizing research and efforts across many geographically distributed contributors in order to turn neural research into engineering reality. From the clinical and patient perspective, the VIE can be used to train end users to control real or virtual neuroprosthetic devices, and to configure and customize clinical and take-home devices.
Neural Research
The neuroscientific goals of Revolutionizing Prosthetics were to evaluate the safety and efficacy of cortical microstimulation for tactile and proprioceptive feedback in humans; to develop active and wireless implantable microelectrodes for stimulating, recording, and demonstrating the viability of chronic implantation; and to evaluate the feasibility of bilateral closed-loop cortical control. Revolutionizing Prosthetics enabled the first-ever neuroprosthetic system controlled with signals from the posterior parietal cortex and the first-ever demonstration of closed-loop cortical control of a dexterous neuroprosthesis using recordings from the motor cortex and parietal reach region and stimulation in the primary somatosensory cortex.
Modular Prosthetic Limb
The first version of the Modular Prosthetic Limb (MPL v1.0) was completed in December 2009. It featured anthropomorphic form factor and appearance, human-like strength and dexterity, high-resolution tactile and position sensing, and a cortical neural interface for intuitive and natural closed-loop control. Made of lightweight carbon fiber and high-strength alloys, the arm had 25 degrees of freedom, or joint motions (the human arm has about 30). This limb was modular and configurable to the level of a patient’s injury. MPL v2.0 was completed in December 2010, and efforts shifted focus to refinement of the MPL system technologies by incremental design improvements for increased reliability, increased simplicity, commonality among subsystems, maximized performance, and evolved software and controls algorithms. MPL systems were used by clinical partners in neural-based research and development of cortical encoding and decoding strategies.
Proto 2

During development of Proto 1, the Revolutionizing Prosthetics team engaged in concurrent research, analysis of alternatives, design, and development efforts for design of a limb including: biomimetic operation including all degrees of freedom, speed, dexterity, and force; electromechanical actuation mechanisms; communications, signal analysis, and control strategies; and comfort and appearance (socket and cosmesis). The mechatronic culmination of these efforts was completed in August 2007. Two versions of Proto 2 were designed—one with an intrinsic hand using off-the-shelf brushless direct current motors, and one with an extrinsic hand using a cobotic device in the forearm with a single motor to control the wrist and hand. There are about 25 microprocessors (computer chips) and 80 tactile sensors built into the fingers, fingertips, hand, wrist, and elbow. The Proto 2 limbs incorporated significant advances in many technologies, leading to the ultimate design of the MPL
Proto 1

Prototype 1 (Proto 1) had eight degrees of freedom—a level of control far beyond the state of the art for prosthetic limbs at the time. As a rapid-development prototype, Proto 1 utilized many commercial off-the-shelf components with the purpose of supporting neural integration research and serving as a test bed for evaluation of haptic feedback and indirect sensory perception approaches. Additionally, Proto 1 was used to demonstrate advanced prosthetic function with classification algorithms for noninvasive and low-invasive control devices. Proto 1 was fitted for the beginning of Revolutionizing Prosthetics clinical evaluations using surface electromyographic control with targeted muscle reinnervation (TMR) patients at the Rehabilitation Institute of Chicago in January 2007.
Major Events
| 2022 | Revolutionizing Prosthetics Participant 4 uses neural control paired with robotic autonomy algorithms to cut and eat a Twinkie with knife and fork |
| 2022 | Revolutionizing Prosthetics Participant 4 demonstrates first-ever focal stimulation of fingertip sensation, spanning 8 fingertips across both hands |
| 2019 | First human (Revolutionizing Prosthetics Participant 4) is implanted with six microelectrode arrays bilaterally, two in the primary motor cortex (M1) hand area and two in the primary sensory cortex (S1) hand area of the left hemisphere of the participant (the dominant one, because the participant is right-handed), and one in M1 and one in S1 of the right (nondominant) side. |
| August 2017 | FDA approves implantation of microelectrode arrays in the motor cortices and somatosensory cortices on both hemispheres in a human candidate. |
| 2016–2017 | Revolutionizing Prosthetics Participant 3 demonstrates control over multiple virtual aircraft in a pilot simulator. |
| 2016–2017 | Revolutionizing Prosthetics Participant 3 is able to perceive forces placed on sensors in each of the fingertips of the MPL through stimulation of the somatosensory cortex. |
| 2015 | First human (Revolutionizing Prosthetics Participant 3) is implanted with four microelectrode arrays, two in the motor cortex and two in the sensory cortex of the left side of the participant (dominant, because the participant is right-handed). |
| 2014 | First human (Revolutionizing Prosthetics Participant 2) demonstrates non-anthropomorphic control of a flight simulator. |
| May 2014 | MPL v3.0 is completed. |
| 2013 | FDA approves implantation of microelectrode arrays in somatosensory (S1) cortex for recording and imparting electrical stimulation. |
| April 2013 | First human is implanted with two microelectrode arrays in parietal cortex (AIP and BA5), with no device-related adverse events to date. |
| December 2012 | “Breakthrough: Robotic limbs moved by the mind” is featured on CBS’ 60 Minutes. |
| December 2012 | Clinical trial results are published in The Lancet. |
| September 2011 | The MPL is controlled by a patient using ECoG during a UPMC and University of Pittsburgh experiment. |
| February 2011 | First human is implanted with two microelectrode arrays in primary motor cortex (M1) hand area, with no device-related adverse events to date. |
| December 2010 | MPL v2.0 is completed. |
| September 2010 | Phase 3 Kickoff meeting for APL Revolutionizing Prosthetics team. |
| December 2009 | Version 1 of the Modular Prosthetic Limb (MPL v1.0) was completed with 17 degrees of freedom. |
| April 2008 | Phase 2 Kickoff meeting for APL Revolutionizing Prosthetics team. |
| August 2007 | Two versions of Proto 2 were completed with 22 degrees of freedom. The extrinsically actuated hand employed a cobot in the forearm driving the hand, wrist, and radial rotator. The intrinsically actuated hand was motor driven. |
| January 2007 | Prototype 1 (Proto 1), with 8 degrees of freedom, began preclinical evaluations using surface myoelectric control. The Virtual Integration Environment (VIE) was used for clinician interface and patient training. |
| January 2006 | Phase 1 Kickoff meeting for APL Revolutionizing Prosthetics team. |
Sponsors
- Defense Advanced Research Projects Agency (DARPA)
- Henry Jackson Foundation
- National Institutes of Health
- National Science Foundation
Program Background
DARPA contracted more than $107 million for the APL-led Revolutionizing Prosthetics program to create a fully functional upper limb that responded to direct neural control. The groundbreaking work done under this program capitalized on previous DARPA investments in neuroscience, robotics, sensors, power systems, and actuation. In particular, this program built on DARPA’s Human Assisted Neural Devices program, which decoded the brain’s motor signals with such fidelity that movements of a robotic arm could be controlled entirely by direct brain control.
The following items illustrate DARPA’s rationale, goals, and commitment to Revolutionizing Prosthetics and associated programs.
- Partners Build High-Tech Hands for Wounded Warriors, by Cheryl Pellerin (American Forces Press Service, December 15, 2010)
- DARPA’s Bio-Revolution, by Jonathan Beard (DARPA: 50 Years of Bridging the Gap, April 2008, pp. 158–160)
- DARPA Revolutionizes Prosthetics: How and Why?, by Judith Philipps Otto (The O&P Edge, November 2007)
- DARPA’s Cutting-Edge Programs Revolutionize Prosthetics, by Donna Miles (American Forces Press Service, February 8, 2006)
Partners

The Revolutionizing Prosthetics team brought together the most respected scientific researchers in their fields, as well as commercial leaders from the prosthetics industry. The project was shaped by a multidisciplinary team that included experts in signal processing and pattern recognition, electrodes for brain implants, mechatronics, neuroscience, electrical engineering, cognitive science, signal processing, battery design, nanotechnology, and even behavioral science.
Our partners played key roles in research and development leading to the current system.
Blackrock Microsystems LLC
Florian Solzbacher, Ph.D.
President and Chairman
E-mail: info@blackrockmicro.com
Website: http://www.blackrockmicro.com/
California Institute of Technology
Richard A. Andersen, Ph.D.
James G. Boswell Professor of Neuroscience
E-mail: andersen@vis.caltech.edu
Website: http://www.vis.caltech.edu/
Fraunhofer-Gesellschaft
Erik Jung, Dipl.-Phys.
Project Coordinator
E-mail: erik.jung@izm.fraunhofer.de
Website: https://www.fraunhofer.de/en.html
HDT Robotics (formerly New World Associates)
Thomas Van Doren, Ph.D.
Chief Operating Officer
E-mail: robotics@hdtglobal.com
Website: http://www.hdtglobal.com/services/robotics/
Intan Technologies, LLC
Reid Harrison, Ph.D.
President and Co-Founder
E-mail: info@intantech.com
Website: http://www.hdtglobal.com/services/robotics/
The Johns Hopkins University School of Medicine
Nitish V. Thakor, Ph.D.
Director, Laboratory for Neuroengineering
E-mail: nitish@jhu.edu
Websites: https://www.bme.jhu.edu/faculty_staff/nitish-v-thakor-phd/, http://www.youtube.com/user/thakorlab
Kinea Design, LLC (an HDT subsidiary)
Julio J. Santos-Munné
Chief of Operations
E-mail: jsantos@kineadesign.com
Northwestern University
Lee E. Miller, Ph.D.
Professor, Physiology/Physical Medicine and Rehabilitation
E-mail: lm@northwestern.edu
Website: https://www.physio.northwestern.edu/faculty/profile.html?xid=14942
University of Chicago
Sliman J. Bensmaia, Ph.D.
Principal Investigator
E-mail: sliman@uchicago.edu
Website: http://bensmaialab.uchicago.edu/
University of Utah
Florian Solzbacher, Ph.D.
Associate Professor
Director, Utah Nanofabrication Laboratory
E-mail: florian.solzbacher@utah.edu
Website: https://www.nanofab.utah.edu/
Walter Reed National Military Medical Center
Website: https://tricare.mil/mtf/Walterreed
Video: Director of Walter Reed Amputee Program speaks at WPI
Arizona State University
Jiping He, Ph.D.
Professor, School of Biological and Health Systems Engineering
E-mail: jiping.he@asu.edu
Website: https://webapp4.asu.edu/directory/person/49553
BioSTAR, Inc.
William P. Wiesmann, M.D.
President and CEO
E-mail: ww@biostargroup.com
Website: http://www.biostargroup.com/management.html
Cielo Solutions
Roger Beseke
E-mail: roger@cielosolutions.net
Duke University
Jon Kuniholm, Ph.D. candidate
Founder, The Open Prosthetics Project
E-mail: http://openprosthetics.org/about/6/contact-us
Website: http://openprosthetics.org/
FlexSys Inc.
Sridhar Kota, Ph.D.
E-mail: kota@engin.umich.edu
Website: http://www.flxsys.com/
Harvey Mudd College
Ziyad Durón, Ph.D.
Chair, Department of Engineering
E-mail: Ziyad_Duron@hmc.edu
Website: http://www.hmc.edu/
Illinois Institute of Technology
Philip R. Troyk, Ph.D.
Associate Professor and Director, Laboratory of Neuroprosthetic Research
E-mail: troyk@iit.edu
Website: https://engineering.iit.edu/faculty/philip-troyk
Johns Hopkins Bloomberg School of Public Health
Susan J. Bartlett, Ph.D.
Associate Professor of Medicine
E-mail: Bartlett@jhmi.edu
Website: http://www.jhsph.edu/mindbodyresearch/faculty/susanbartlett.html
Ellen MacKenzie, Ph.D.
Chair, Fred and Julie Soper Professor in Health Policy and Management
E-mail: emackenz@jhsph.edu
Website: http://www.jhsph.edu/faculty/directory/profile/1521/MacKenzie/Ellen
The Johns Hopkins University School of Medicine
Ross E. Andersen, Ph.D. (currently with McGill University)
Associate Professor of Medicine
E-mail: ross.andersen@mcgill.ca
Website: https://www.mcgill.ca/edu-kpe/ross.andersen
Steven Hsiao, Ph.D.
Professor of Neuroscience, Zanvyl Krieger Mind/Brain Institute
Xiaofeng Jia, M.D., Ph.D.
Assistant Research Professor
E-mail: xjia1@jhmi.edu
Website: https://www.bme.jhu.edu/faculty_staff/xiaofeng-jia-md-phd/
The Johns Hopkins University Whiting School of Engineering
Ralph Etienne-Cummings, Ph.D.
Professor of Electrical and Computer Engineering
E-mail: retienne@jhu.edu
Website: https://engineering.jhu.edu/ece/faculty/etienne-cummings-ralph/
Allison Okamura, Ph.D. (currently with Stanford University)
Associate Professor, Department of Mechanical Engineering
E-mail: aokamura@stanford.edu
Websites: https://lcsr.jhu.edu/, https://charm.stanford.edu/Main/AllisonOkamura/
Martin Bionics (acquired by Orthocare Innovations)
Jay Martin, CP, LP, FAAOP
Founder and President
E-mail: jjaymartin@me.com
Website: http://www.martinbionics.com/
McGill University
Ross Andersen, Ph.D.
Professor, Department of Kinesiology and Physical Education
E-mail: ross.andersen@mcgill.ca
Website: https://www.mcgill.ca/edu-kpe/ross.andersen
McQ Inc.
Barry M. Jones
Vice President
E-mail: bjones@mcqinc.com
Website: http://www.mcqinc.com/
MicroProbes for Life Science
Martin Bak
Chief Executive Officer
Head of Research and Development
E-mail: mprobe1@aol.com
Website: http://www.microprobes.com/
Microprocessor Designs
Jeff Finkelstein
President
E-mail: jfink@updesigns.com
Website: https://www.updesigns.com/
National Institute of Aerospace
Cheol Park, Ph.D.
Research Fellow
E-mail: c.park@larc.nasa.gov
Website: https://www.nianet.org/
National Rehabilitation Hospital
Joseph Bleiberg, Ph.D. (currently with National Intrepid Center of Excellence)
Neuropsychologist Director, Center for Cognitive Neuroscience
E-mail: joseph.bleiberg@bethesdaneuropsychology.com
Website: https://tricare.mil/mtf/WalterReed/Health-Services/M_S/NICoE
Northwestern University
J. Edward Colgate, Ph.D.
Professor of Mechanical Engineering
E-mail: colgate@northwestern.edu
Oak Ridge National Laboratory
Art Clemons
Energy Materials Program
E-mail: clemonsa@ornl.gov
Website: http://www.ornl.gov/
Orthocare Innovations, LLC
David Boone, C.P., M.P.H., Ph.D.
Chief Technology Officer
Co-Founder
E-mail: dboone@orthocareinnovations.com
Website: http://www.orthocareinnovations.com/
Otto Bock HealthCare Products GmbH
Hans Dietl, Ph.D.
Chief Technology Officer
E-mail: Hans.Dietl@ottobock.com
Website: http://www.ottobock.com/
Rehabilitation Institute of Chicago
Todd Kuiken, M.D., Ph.D.
Director, Center for Bionic Medicine
E-mail: tkuiken@northwestern.edu
Richard F. ff. Weir, Ph.D. (currently with University of Colorado Denver)
Director, Biomechatronics Development Laboratory
E-mail: Richard.Weir@ucdenver.edu
Ripple, LLC
K. Shane Guillory, Ph.D.
Director of Research and Development
E-mail: shane@rppl.com
Website: https://rippleneuro.com/
Rutgers University
Dan Lewitus, Ph.D.
E-mail: lewitus@eden.rutgers.edu
Website: http://www.njbiomaterials.org/web/index.php?p=resbio&s=87419
Scuola Superiore Sant’Anna
Paolo Dario, Dr. Eng.
Founder, Advanced Robotics Technologies and Systems (ARTS) Laboratory
Director, Center for Research in Microengineering (CRIM) Laboratory
E-mail: dario@sssup.it
Website: https://www.santannapisa.it/en/institute/biorobotics/artificial-hands-area
Sigenics
Douglas A. Kerns, Ph.D.
Engineering Director
E-mail: kerns@sigenics.com
Website: https://www.sigenics.com/
Stanford University
Krishna V. Shenoy, Ph.D.
Associate Professor of Electrical Engineering
Principal Investigator NPSL
E-mail: Shenoy_prosthetics@stanford.edu
Website: https://shenoy.people.stanford.edu/overview
Syntronics
Brian Tacke
President, Instrumentation Division
E-mail: btacke@syntronics.net
Website: http://www.syntronics.net/
Umeå University
Roland S. Johansson, Ph.D., M.D.
Vice Chairman, Department of Integrative Medical Biology
Professor of Physiology
E-mail: Roland.S.Johansson@physiol.umu.se
Website: http://www.imb.umu.se/english
University of California, Irvine
William C. Tang, Ph.D.
Associate Dean for Research, Henry Samueli School of Engineering
E-mail: wctang@uci.edu
Website: http://wctgroup.eng.uci.edu/
University of Michigan
Sridhar Kota, Ph.D.
Professor, Department of Mechanical Engineering
Director, Compliant Systems Design Laboratory
E-mail: kota@engin.umich.edu
Website: http://csdl.engin.umich.edu/
University of New Brunswick
Kevin Englehart, Ph.D., P.Eng.
Professor, Electrical and Computer Engineering
Associate Director, Institute of Biomedical Engineering
E-mail: kengleha@unb.ca
Website: http://www.ee.unb.ca/kengleha/
University of Pittsburgh
Michael L. Boninger, M.D.
Professor and Chair, Department of Physical Medicine and Rehabilitation
E-mail: boninger@pitt.edu
Website: http://www.rehabmedicine.pitt.edu/
Andrew B. Schwartz, Ph.D.
Professor, Department of Neurobiology
E-mail: abs21@pitt.edu
Website: http://schwartzlab.neurobio.pitt.edu/
University of Rochester Medical Center
Marc H. Schieber, M.D., Ph.D.
Professor, Departments of Neurology (Cognitive Behavioral Neurology), Neurobiology and Anatomy, and Brain/Cognitive Sciences
E-mail: mhs@cvs.rochester.edu
Website: http://www.urmc.rochester.edu/labs/Schieber-Lab/
University of Southern California
Gerald E. Loeb, M.D.
Director, Medical Device Development Facility
E-mail: gloeb@usc.edu
Website: https://mddf.usc.edu/
University of Utah
Gregory A. Clark, Ph.D.
Associate Professor
E-mail: Greg.Clark@utah.edu
Website: http://www.bioen.utah.edu/research/research_initiatives.php?op=show&id=1
Vanderbilt University
Michael Goldfarb, Ph.D.
H. Fort Flowers Professor of Mechanical Engineering
E-mail: michael.goldfarb@vanderbilt.edu
Website: http://research.vuse.vanderbilt.edu/cim/
Van Doren Designs
Matthew J. Van Doren, Ph.D., PE Principal
E-mail: info@vandorendesigns.com
Website: https://www.vandorendesigns.com/
- Center for the Intrepid Brooke Army Medical Center
- Center for Neuroscience and Regenerative Medicine, Uniformed Services University of the Health Sciences
- Department of Veterans Affairs
- Research Update: VA Study to Optimize DEKA Arm
- Food and Drug Administration Center for Devices and Radiological Health: Medical Device Innovation Initiative
- NASA Johnson Space Center
- NASA Langley Research Center
- Neural Interfaces Research, National Institute of Neurological Disorders and Stroke
- Advanced Prosthetics and Neural Engineering Research Program, Telemedicine and Advanced Technology Research Center
- Recommended Reading: Robotics Research Gives Life to Artificial Limbs
- U.S. Army Medical Research and Materiel Command