
Intelligent Systems Center
Focus Areas

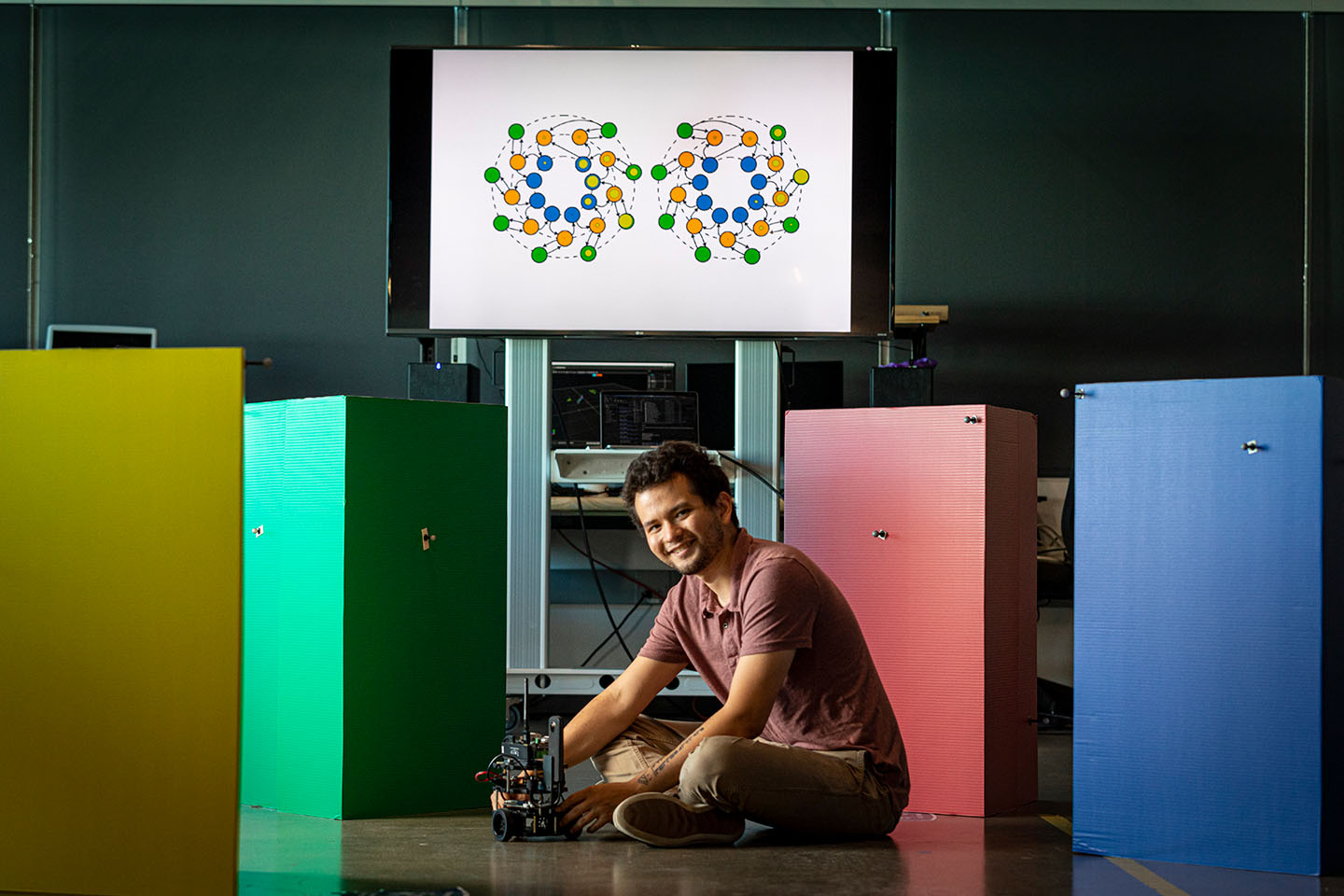
Robotics Intelligence
Creating capabilities that give robots the speed, agility, and intuition required to operate in the most complex and challenging environments while teaming with human partners

AI for Complex Systems
Leveraging the power of artificial intelligence and mathematics to spur innovation and novel solutions to challenges at the intersection of Earth systems and national security

Lifelong Learning Machines
Enabling intelligent systems that continuously adapt to changing conditions and missions in the real world

Mission-Focused Generative AI
Inventing the future of artificial intelligence for the nation by advancing frontier models that enable creativity, subject-matter expertise, and personification
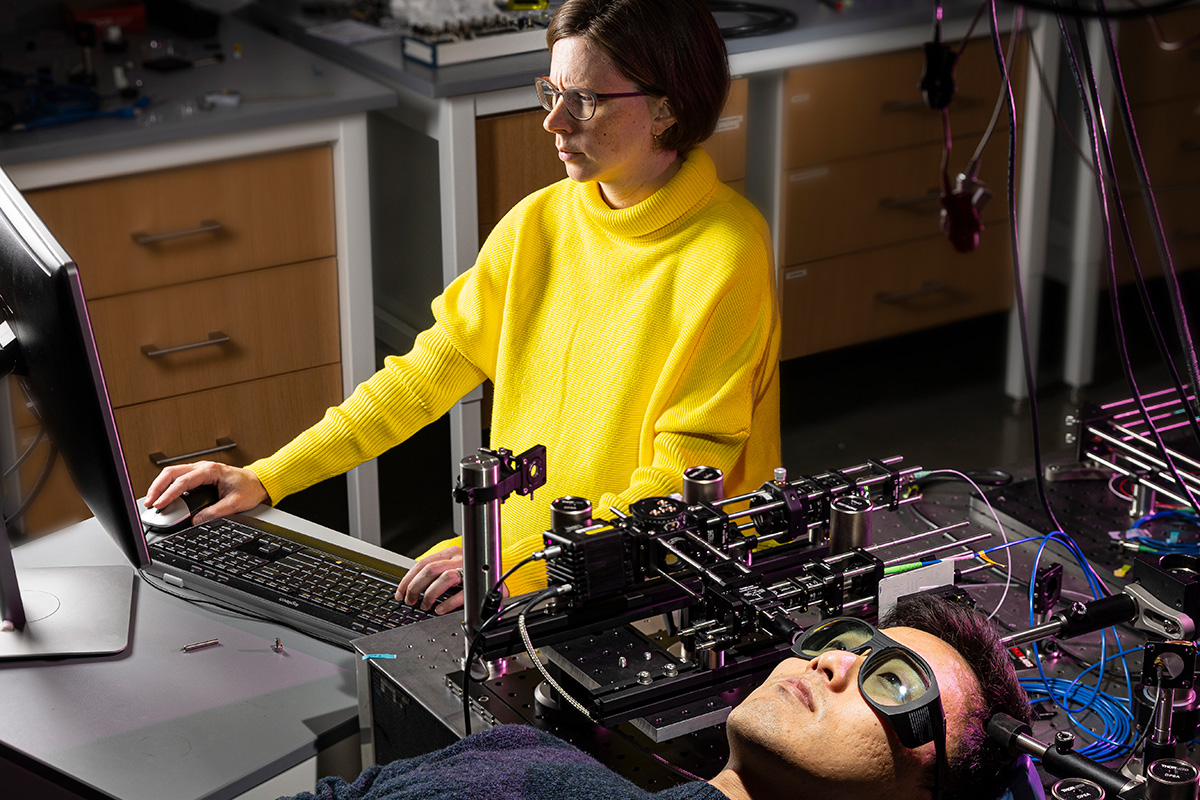
Neural Interfaces
Directly interfacing with the nervous system to restore lost functions and enhance human capability
Neuroscience-Inspired Artificial Intelligence
Developing next-generation algorithms and computing substrates that leverage neurobiology to revolutionize intelligent systems

Robust and Resilient Artificial Intelligence
Developing the next generation of intelligent systems for missions characterized by uncertain, dynamic, and adversarial environments

Research Tools
Explore open-source software, competitions, and datasets developed by the ISC.
Tour the ISC
The ISC is a multidisciplinary, collaborative space intended to inspire people to engage in creative intelligent systems innovations.

Complex Systems Lab
The Complex Systems Lab provides a cutting-edge workspace and demonstration area dedicated to leveraging artificial intelligence and mathematics to address challenges in complex biological, physical, and Earth systems.

GenAISys Lab
Occupying about 1,000 square feet of space within the ISC, the GenAISys Lab is a collaborative and innovative workspace that provides access to cutting-edge GPU compute for generative AI research and development. The mission of the GenAISys Lab is to pioneer the frontiers of generative AI, crafting intelligent systems that possess the power to create, adapt, and evolve. Computing resources include a generative AI research cluster; a live demo server; generative AI development workstations; display, touchscreen, and videoconferencing capabilities; and motion capture.

Innovation Lab
The Innovation Lab houses a flexible environment for dynamic multidisciplinary collaboration and teaming. The lab anchors much of APL’s research in ground robotics, advanced manipulation, machine perception, autonomous systems, and novel control for uncrewed ground vehicles and uncrewed aerial systems.

Neuroengineering Lab
The Neuroengineering Lab enables a variety of testing scenarios that explore neural interfaces, psychophysiological assessment, and mixed reality.

Robotics Lab
The Robotics Lab contains cutting-edge robotics tools and hardware for ground and aerial systems, a 300-square-foot motion-capture facility, and a state-of-the-art mobile lab for field experimentation.

Johns Hopkins APL and Microsoft’s AI Agent Orchestrates Robotic Teams Dec 2, 2025

Johns Hopkins APL, Microsoft Collaborate to Advance Robotics and Materials Discovery Using AI Apr 2, 2025

From Tool to Teammate: Opening the Aperture on Human-Robot Teaming Aug 22, 2024
Johns Hopkins APL Joins National AI Safety Consortium Mar 8, 2024

Designing Conversational AI to Provide Medical Assistance on the Battlefield Aug 17, 2023
